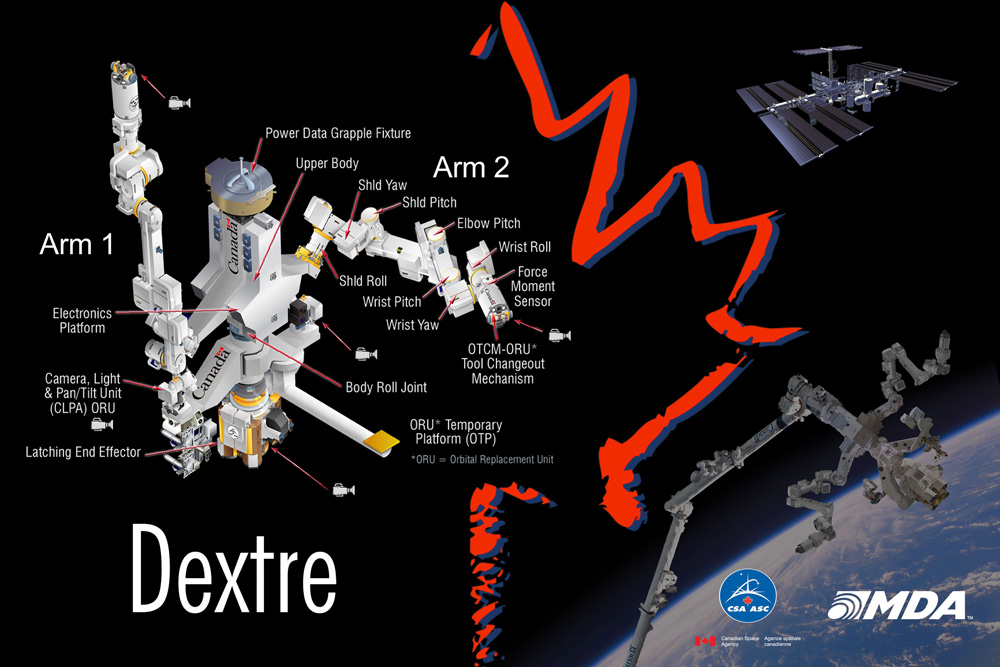
Dextre is made of titanium, the same metal used in airplanes and satellites, and looks like a stick figure with a thin body and two 10-foot-long arms. The arms can turn, reach and grab in seven different ways.
Most of the work Dextre would do on the Hubble Space Telescope would be directed by people on the ground twisting and turning the robot using controllers, much like the ones used on video games.
The most important job Dextre would be programmed to do would be giving Hubble new batteries. Without new batteries the telescope would stop operating around 2008.
Hubble takes a lot of big batteries. It needs six new batteries to replace the ones that are kept in a special compartment hooked up to the underside of the telescope. For the power to flow from the batteries to Hubble, Dextre would connect cables from the batteries to the solar panels on Hubble.
Other jobs planned for Dextre to do were to give Hubble a new camera and mount six new gyroscopes –- instruments that help keep the telescope level.

NASA scientists believed Dextre would be able to do the job in about a month. Robots, after all, can work around the clock, without needing to sleep, eat or go to the bathroom.
In order to get Dextre to Hubble, NASA needed to build a robotic vehicle that would dock with Hubble 360 miles above Earth. Riding along on this vehicle would be the de-orbit module. When the time finally came for Hubble's mission to end, the de-orbit module would steer the telescope into the ocean.
But in December 2004 the idea of sending the robot to do repairs was dealt a severe blow. Sean O'Keefe, the NASA administrator and strong backer of the mechanized undertaking, announced that the robotic mission was being discarded.
Two of the prominent reasons for this decision were that there was not enough time to program Dextre to ensure success, and there was no money to fund the preparation and the trip. After the announcement O'Keefe resigned as NASA chief.